|
Mariliza Tzes I'm a PhD student at the GRASP Lab of the University of Pennsylvania, advised by George J. Pappas. Before that, I did my undergraduate studies at the University of Patras, where I worked with Stamatis Manesis and Anthony Tzes. During my PhD studies, I completed a M.S.E. in Robotics from University of Pennsylvania in 2020. I've also worked as an Applied Scientist intern at Amazon Robotics and AI, where I applied state-of-the-art multi-modal learning methods for item identification. |

|
ResearchMy research interests lie at the intersection of robotics and artificial intelligence, specializing in the development of innovative autonomous systems and algorithms designed for optimal information acquisition and decision-making in dynamic, uncertain environments and in collaborative multi-agent scenarios. The focus of my current research is on building efficient task and motion planning methods leveraging Large Language Models. |
|
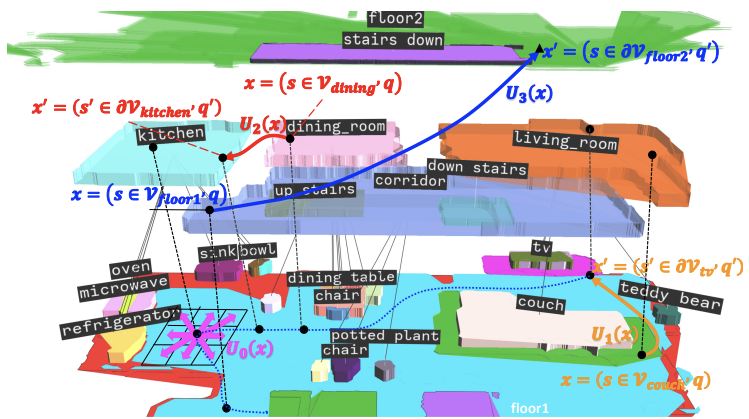
Optimal Scene Graph Planning with Large Language Model Guidance
Zhirui Dai, Arash Asgharivaskasi, Thai Duong, Shusen Lin, Mariliza Tzes, George J. Pappas, Nikolay Atanasov IEEE International Conference on Robotics and Automation (ICRA), 2024 project page / video / arxiv Recent advances in metric, semantic, and topological mapping have equipped autonomous robots with semantic concept grounding capabilities to interpret natural language tasks. This work aims to leverage these new capabilities with an efficient task planning algorithm for hierarchical metric-semantic models. We consider a scene graph representation of the environment and utilize a large language model (LLM) to convert a natural language task into a linear temporal logic (LTL) automaton. Our main contribution is to enable optimal hierarchical LTL planning with LLM guidance over scene graphs. |
|
Graph Neural Networks for Multi-Robot Active Information Acquisition
Mariliza Tzes, Nikolaos Bousias,Evangelos Chatzipantazis, George J. Pappas IEEE International Conference on Robotics and Automation (ICRA), 2023 (Outstanding Paper Award in Multi-Robot Systems) project page / video / paper / arxiv We propose the Information-aware Graph Block Network (I-GBNet), an Active Information Acquisition adaptation of Graph Neural Networks, that aggregates information over the graph representation and provides sequential-decision making in a distributed manner. Numerical simulations on significantly larger graphs and dimensionality of the hidden state and more complex environments than those seen in training validate the properties of the proposed architecture and its efficacy in the application of localization and tracking of dynamic targets. |
|
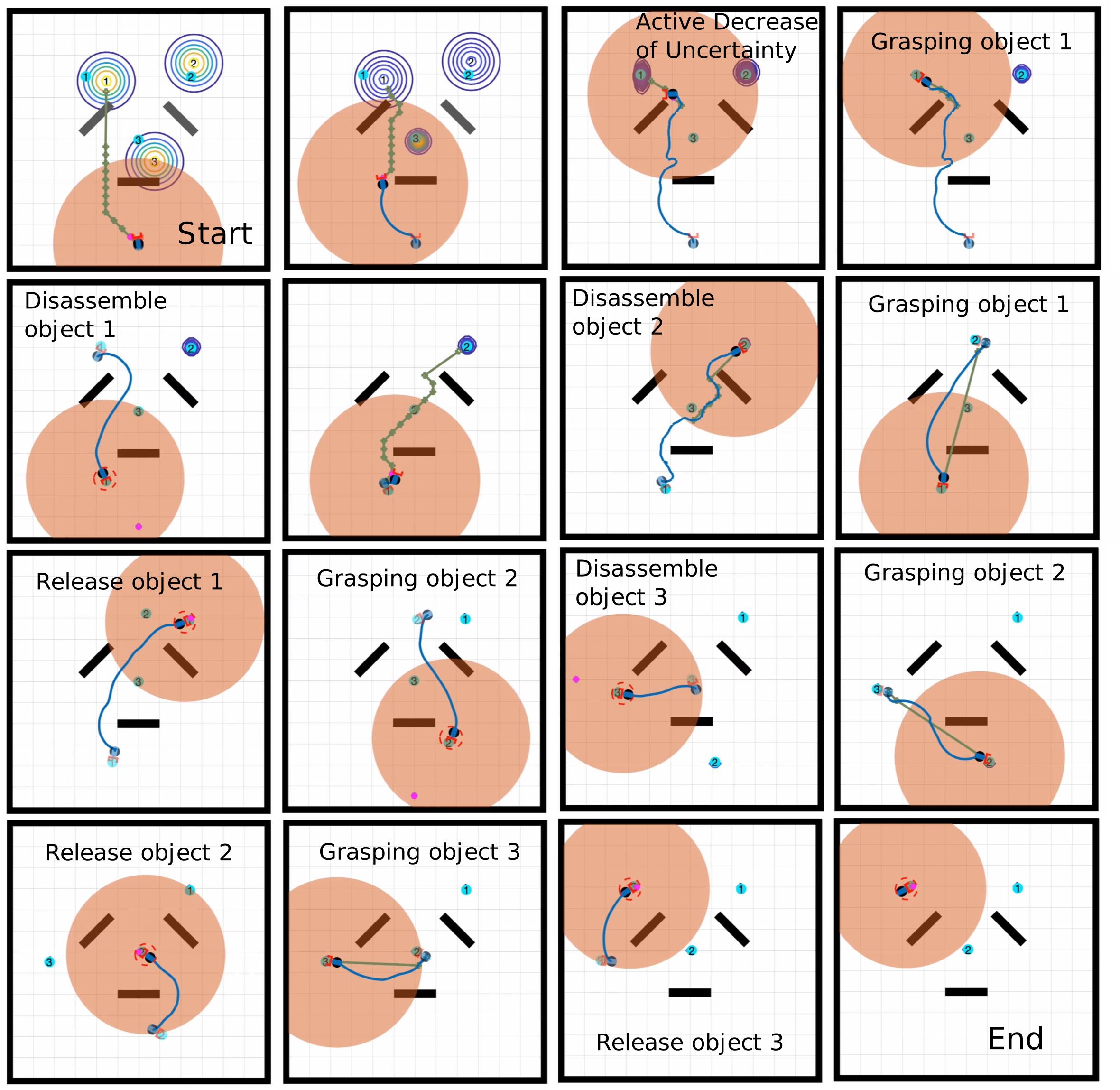
Reactive Informative Planning for Mobile Manipulation Tasks under Sensing and Environmental Uncertainty
Mariliza Tzes, Vasileios Vasilopoulos, Yiannis Kantaros, George J. Pappas IEEE International Conference on Robotics and Automation (ICRA), 2022 video / paper / arxiv We propose a hybrid control architecture, where a symbolic controller generates high-level manipulation commands (e.g., grasp an object) based on environmental feedback, an informative planner designs paths to actively decrease the uncertainty of objects of interest, and a continuous reactive controller tracks the sparse waypoints comprising the informative paths while avoiding a priori unknown obstacles. The overall architecture can handle environmental and sensing uncertainty online, as the robot explores its workspace. Using numerical simulations, we show that the proposed architecture can handle tasks of increased complexity while responding to unanticipated adverse configurations. |
|
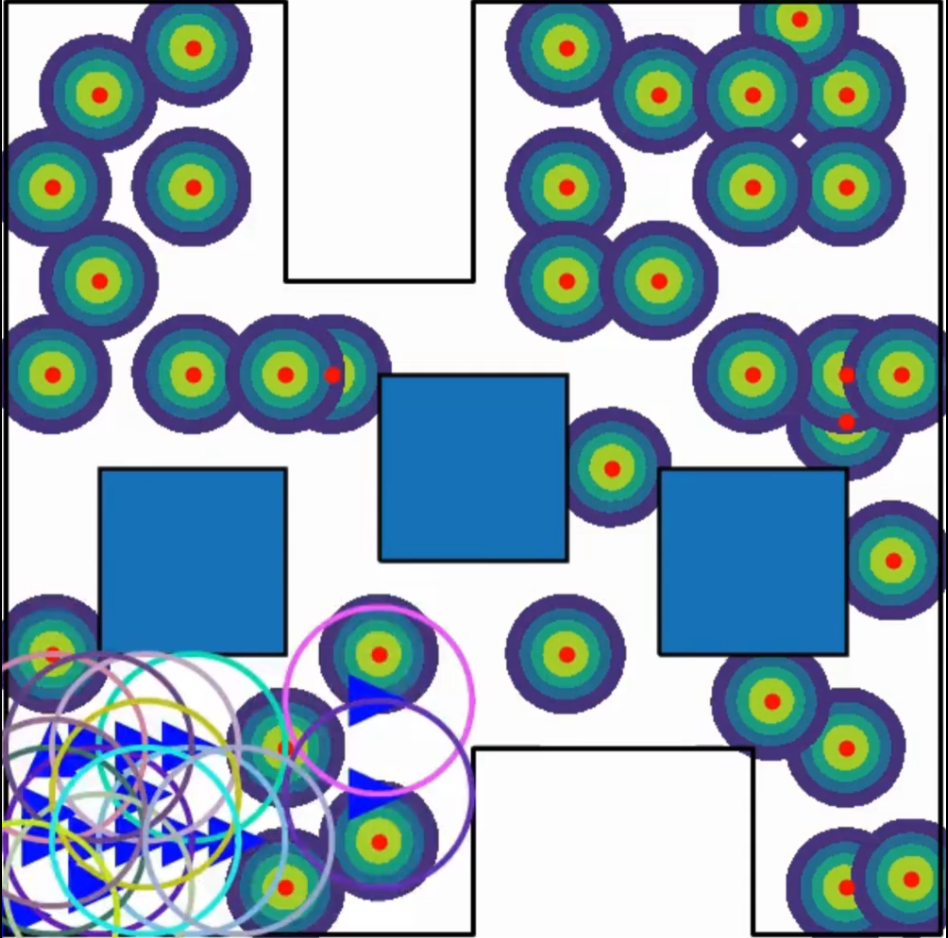
Distributed Sampling-based Planning for Non-Myopic Active Information Acquisition
Mariliza Tzes, Yiannis Kantaros, George J. Pappas IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 slides / paper / arxiv This paper addresses the problem of active information gathering for multi-robot systems. Specifically, we consider scenarios where robots are tasked with reducing uncertainty of dynamical hidden states evolving in complex environments. We propose a novel distributed sampling-based planning algorithm that can significantly increase robot and target scalability while decreasing computational cost. We show that the proposed algorithm is probabilistically complete and asymptotically optimal. |
|
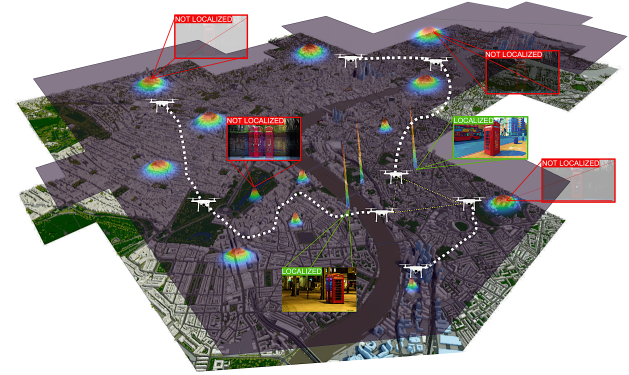
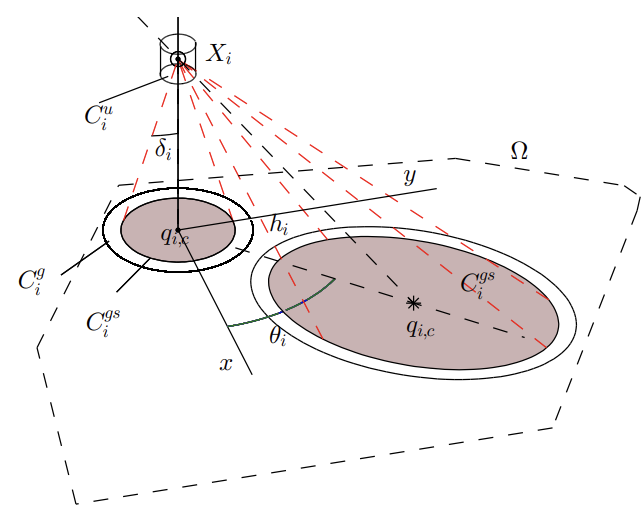
Collaborative visual area coverage using aerial agents equipped with PTZ-cameras under localization uncertainty
Nikolaos Bousias, Sotiris Papatheodorou, Mariliza Tzes, Anthony Tzes European Control Conference (ECC), 2019 paper Using a Voronoi-free area tessellation framework and a gradient scheme, we designed a control method for the coverage of a convex region by a team of mobile aerial agents (MAAs) under localization uncertainty. In this work, the agents are equipped with Pan-Tilt-Zoom (PTZ) cameras. |
|
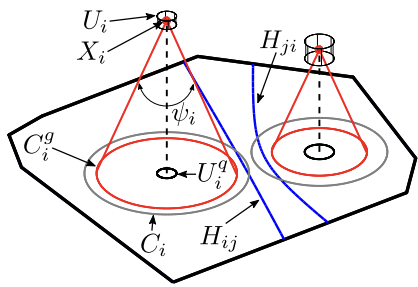
Visual Area Coverage by Heterogeneous Aerial Agents Under Imprecise Localization
Mariliza Tzes, Sotiris Papatheodorou, Anthony Tzes IEEE Control Systems Letters, Volume:2 Issue: 4, 2018 Control and Decision Conference (CDC), 2018 video / paper We designed a novel control scheme for the coverage of a convex region by a team of mobile aerial agents (MAAs) equipped with downwards facing camers, under positioning uncertainty. |